Vectors#
Definition
A (Euclidean) vector is a finite ordered set of real numbers.
For the time being we will only work with Euclidean vectors, so for now we will drop the term Euclidean and just refer to these objects as vectors. Later on, we will be talking about other types of vectors and then the distinction will be useful again. And yes, infinite vectors can be considered too, but that topic falls outside the scope of what will be covered here.
We write vectors using rectangular brackets and organize their data into vertical columns (column vectors), unless told to do otherwise (we will work with row vectors later on). Typically, when typing we represent vectors with bolded lower-case letters from the end of the alphabet; when writing by hand we add a small arrow atop the letter. For example,
are vectors with three entries, and if I was writing this by hand instead of typing it I would have written \(\mathbf{v}\) as \(\vec{v}\). The entries in a vector are called its components, and they are distinguished via subscripts. For example, in the vector above, the third component of \(\mathbf{v}\) is \(v_3=3\), and the second component of \(\mathbf{u}\) is \(u_2=0\). The number of components of a vector is its dimension. Both of the vectors above are 3-dimensional.
Linear algebra originated over 200 years ago to address the need to describe geometric objects with both a direction and a magnitude. For example, a force applied to an object has both a magnitude - the amount of force applied - and a direction in which that force is applied. ‘Vector’ is the term used to describe such an object, which originates in Latin, where it means ‘carrier.’ A helpful way to think about a Euclidean vector originating at point A and terminating at point B is as the force needed to move from point A to point B.
import matplotlib.pyplot as plt
import numpy as np
# Define the vector components
vector = np.array([3, 2]) # Example vector (3, 2)
# Create figure with two subplots
fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(12, 5))
# Plot 1: Vector in standard position (starting from origin)
ax1.quiver(0, 0, vector[0], vector[1], angles='xy', scale_units='xy', scale=1,
color='red', width=0.005, headwidth=3, headlength=4)
ax1.set_xlim(-1, 4)
ax1.set_ylim(-1, 3)
ax1.set_aspect('equal')
ax1.grid(True, alpha=0.3)
ax1.set_xlabel('X')
ax1.set_ylabel('Y')
ax1.set_title('Vector in Standard Position')
# Add vector label
ax1.annotate(f'v = ({vector[0]}, {vector[1]})',
xy=(vector[0]/2, vector[1]/2),
xytext=(vector[0]/2 + 0.5, vector[1]/2 + 0.5),
fontsize=12, color='red', weight='bold')
# Add origin point
ax1.plot(0, 0, 'ko', markersize=6)
ax1.annotate('Origin (0,0)', xy=(0, 0), xytext=(0.2, -0.3), fontsize=10)
# Plot 2: Same vector in different positions
positions = [
np.array([0, 0]), # Standard position
np.array([1, 1]), # Translated position 1
np.array([-1, 2]), # Translated position 2
np.array([2, -1]), # Translated position 3
np.array([-2, -1]) # Translated position 4
]
colors = ['red', 'blue', 'green', 'orange', 'purple']
labels = ['Standard', 'Position 1', 'Position 2', 'Position 3', 'Position 4']
for i, (pos, color, label) in enumerate(zip(positions, colors, labels)):
ax2.quiver(pos[0], pos[1], vector[0], vector[1],
angles='xy', scale_units='xy', scale=1,
color=color, width=0.004, headwidth=3, headlength=4,
label=label)
# Mark starting points
ax2.plot(pos[0], pos[1], 'o', color=color, markersize=4)
# Add position labels
if i > 0: # Skip labeling the origin
ax2.annotate(f'({pos[0]}, {pos[1]})',
xy=(pos[0], pos[1]),
xytext=(pos[0] + 0.3, pos[1] + 0.3),
fontsize=8, color=color)
ax2.set_xlim(-4, 6)
ax2.set_ylim(-3, 5)
ax2.set_aspect('equal')
ax2.grid(True, alpha=0.3)
ax2.set_xlabel('X')
ax2.set_ylabel('Y')
ax2.set_title('Same Vector in Different Positions')
ax2.legend(loc='upper right', fontsize=9)
# Add text explaining the concept
fig.suptitle(f'Vector v = ({vector[0]}, {vector[1]}) - Same Direction and Magnitude',
fontsize=14, weight='bold')
plt.tight_layout()
plt.show()
Important
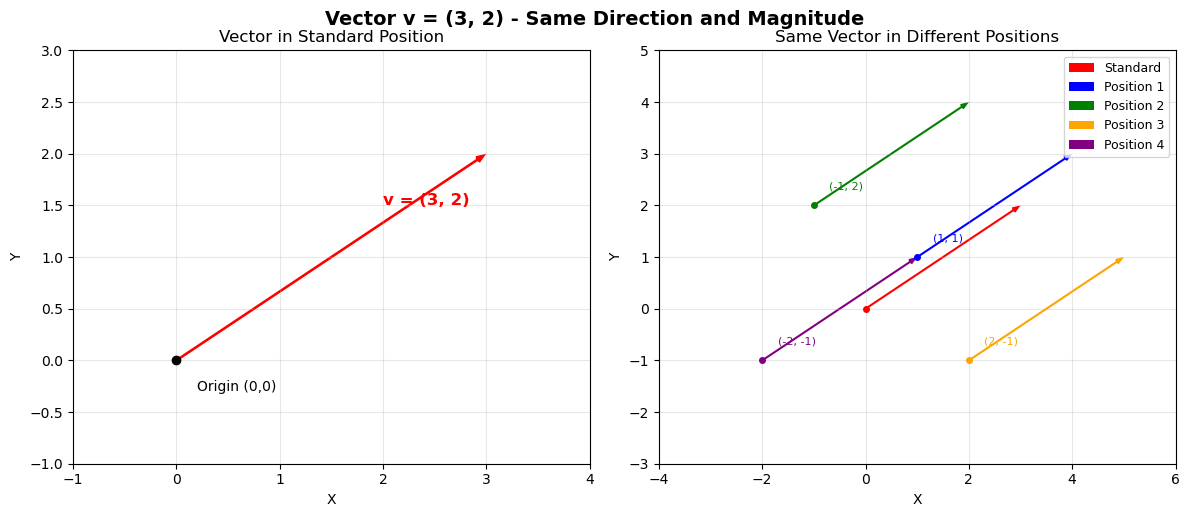
Note that when we represent a vector as an arrow as we have done above that the vector need not originate at the origin, it can start anywhere. Thus, the represention of a vector as an arrow is not unique. However, the arrow’s magnitude and direction always are. This is illustrated in the plot on the right: every one of those arrows is a perfectly good visual representation of the vector in the plot on the left.
Important
Mathematicians typically use 1-based indexing for vectors; that is, the first component of a vector \(\mathbf{u}\) is \(u_1\). In contrast, the convention in most programming languages (and in particular, the convention in the Python programming language that we are using here) is to use 0-based indexing, where the first component in a list or array is the \(0^{th}\) component. Since this book is as much about programming as it is about math we will have to deal with this inconsistency frequently. Going forward, we will adopt the mathematical convention of using 1-based indexing unless we are actually writing code, when we will switch to 0-based indexing.
Vector Arithmetic#
In general, arithmetic with vectors is only defined when the vectors have the same number of components. As long as that is the case, most arithmetic operations on vectors are straightforward, because most operations are done componentwise; that is, between the components of the vectors.
Equality: Two vectors \(\mathbf{u}\) and \(\mathbf{v}\) are equal if and only if the have the same number of components and all of those components are equal.
Example:
because their third components are not equal: \(-1 \neq 0\).
because the two vectors do not have the same number of components.
Vector Addition: Let \(\mathbf{u}\) and \(\mathbf{v}\) be vectors with \(n\) components. Then \(\mathbf{w} = \mathbf{u} + \mathbf{v}\) is the vector whose \(i^{th}\) component \(w_i = u_i + v_i\).
Example:
Example:
is undefined, because the vectors do not have the same number of components.
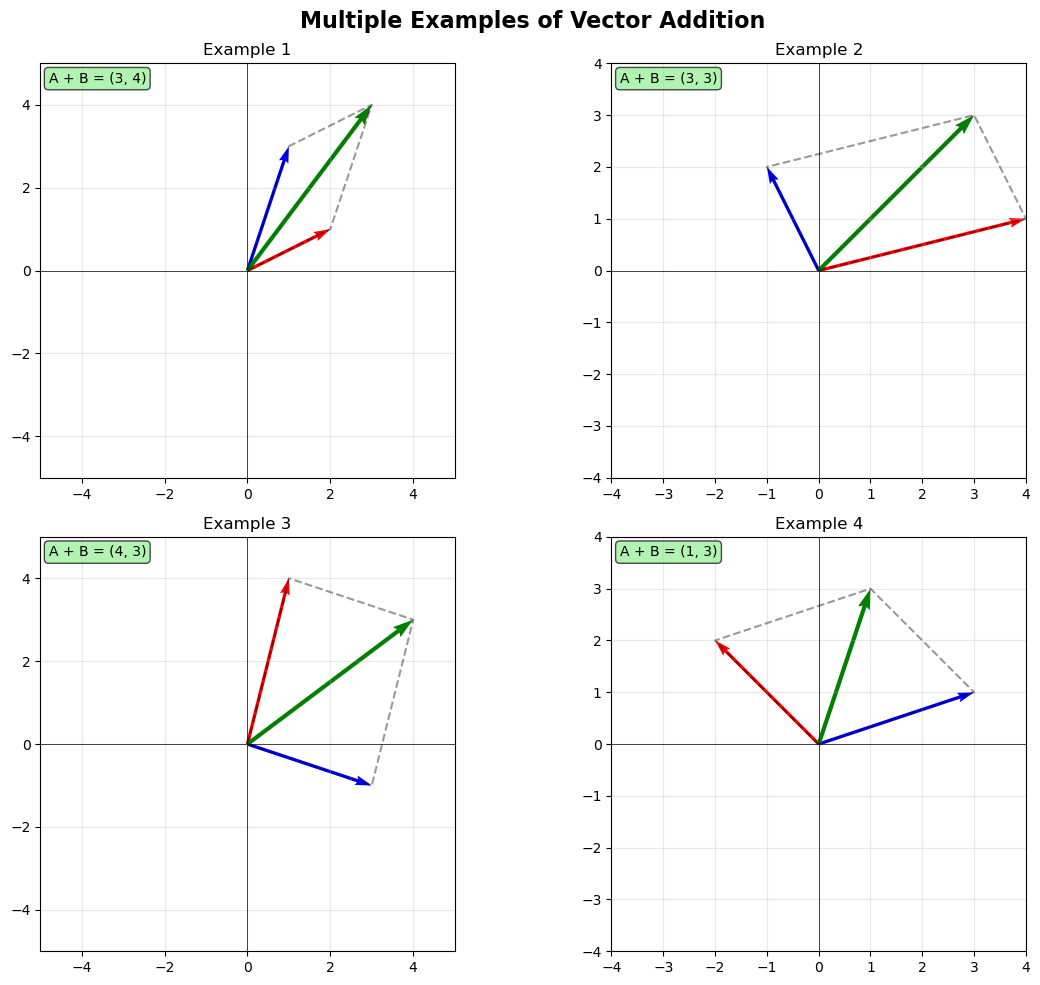
This simple componentwise addition has an elegant visual interpretation illustrated below. Thinking of vectors as representing forces, we see here the interaction of multiple forces acting on a single point simultaneously.
import matplotlib.pyplot as plt
import numpy as np
def plot_vector_addition():
# Create figure and axis
fig, ax = plt.subplots(1, 1, figsize=(10, 8))
# Define two vectors
vector_a = np.array([3, 2])
vector_b = np.array([2, 4])
# Calculate resultant vector
resultant = vector_a + vector_b
# Origin point
origin = np.array([0, 0])
# Plot the original vectors from origin
ax.quiver(origin[0], origin[1], vector_a[0], vector_a[1],
angles='xy', scale_units='xy', scale=1,
color='red', width=0.008, label='Vector A')
ax.quiver(origin[0], origin[1], vector_b[0], vector_b[1],
angles='xy', scale_units='xy', scale=1,
color='blue', width=0.008, label='Vector B')
# Plot the resultant vector
ax.quiver(origin[0], origin[1], resultant[0], resultant[1],
angles='xy', scale_units='xy', scale=1,
color='green', width=0.010, label='A + B')
# Create parallelogram by plotting translated vectors
# Vector A translated to tip of vector B
ax.quiver(vector_b[0], vector_b[1], vector_a[0], vector_a[1],
angles='xy', scale_units='xy', scale=1,
color='red', width=0.005, alpha=0.6, linestyle='--')
# Vector B translated to tip of vector A
ax.quiver(vector_a[0], vector_a[1], vector_b[0], vector_b[1],
angles='xy', scale_units='xy', scale=1,
color='blue', width=0.005, alpha=0.6, linestyle='--')
# Draw parallelogram edges (dashed lines for clarity)
parallelogram_x = [0, vector_a[0], resultant[0], vector_b[0], 0]
parallelogram_y = [0, vector_a[1], resultant[1], vector_b[1], 0]
ax.plot(parallelogram_x, parallelogram_y, 'k--', alpha=0.4, linewidth=1)
# Add vector labels at their midpoints
ax.text(vector_a[0]/2 - 0.3, vector_a[1]/2 - 0.2, 'A',
fontsize=12, fontweight='bold', color='red')
ax.text(vector_b[0]/2 + 0.2, vector_b[1]/2, 'B',
fontsize=12, fontweight='bold', color='blue')
ax.text(resultant[0]/2 + 0.3, resultant[1]/2 + 0.2, 'A + B',
fontsize=12, fontweight='bold', color='green')
# Add coordinate labels at vector tips
ax.plot(vector_a[0], vector_a[1], 'ro', markersize=6)
ax.plot(vector_b[0], vector_b[1], 'bo', markersize=6)
ax.plot(resultant[0], resultant[1], 'go', markersize=8)
ax.text(vector_a[0] + 0.1, vector_a[1] + 0.1, f'({vector_a[0]}, {vector_a[1]})',
fontsize=10, color='red')
ax.text(vector_b[0] + 0.1, vector_b[1] + 0.1, f'({vector_b[0]}, {vector_b[1]})',
fontsize=10, color='blue')
ax.text(resultant[0] + 0.1, resultant[1] + 0.1, f'({resultant[0]}, {resultant[1]})',
fontsize=10, color='green')
# Set axis properties
ax.set_xlim(-1, 7)
ax.set_ylim(-1, 7)
ax.set_aspect('equal')
ax.grid(True, alpha=0.3)
ax.axhline(y=0, color='k', linewidth=0.5)
ax.axvline(x=0, color='k', linewidth=0.5)
# Labels and title
ax.set_xlabel('X', fontsize=12)
ax.set_ylabel('Y', fontsize=12)
ax.set_title('Vector Addition using the Parallelogram Rule', fontsize=14, fontweight='bold')
ax.legend(loc='lower right')
# Add explanatory text
explanation = ("The parallelogram rule states that the sum of two vectors\n"
"is the diagonal of the parallelogram formed by the vectors.\n"
"Dashed lines show the completed parallelogram.")
ax.text(0.02, 0.98, explanation, transform=ax.transAxes, fontsize=10,
verticalalignment='top', bbox=dict(boxstyle='round', facecolor='wheat', alpha=0.8))
plt.tight_layout()
plt.show()
def plot_multiple_examples():
"""Plot multiple vector addition examples"""
fig, axes = plt.subplots(2, 2, figsize=(12, 10))
# Different vector pairs
examples = [
([2, 1], [1, 3], 'Example 1'),
([4, 1], [-1, 2], 'Example 2'),
([1, 4], [3, -1], 'Example 3'),
([-2, 2], [3, 1], 'Example 4')
]
for idx, (vec_a, vec_b, title) in enumerate(examples):
ax = axes[idx//2, idx%2]
vector_a = np.array(vec_a)
vector_b = np.array(vec_b)
resultant = vector_a + vector_b
origin = np.array([0, 0])
# Plot vectors
ax.quiver(origin[0], origin[1], vector_a[0], vector_a[1],
angles='xy', scale_units='xy', scale=1,
color='red', width=0.008)
ax.quiver(origin[0], origin[1], vector_b[0], vector_b[1],
angles='xy', scale_units='xy', scale=1,
color='blue', width=0.008)
ax.quiver(origin[0], origin[1], resultant[0], resultant[1],
angles='xy', scale_units='xy', scale=1,
color='green', width=0.010)
# Draw parallelogram
parallelogram_x = [0, vector_a[0], resultant[0], vector_b[0], 0]
parallelogram_y = [0, vector_a[1], resultant[1], vector_b[1], 0]
ax.plot(parallelogram_x, parallelogram_y, 'k--', alpha=0.4)
# Formatting
max_val = max(abs(resultant[0]), abs(resultant[1])) + 1
ax.set_xlim(-max_val, max_val)
ax.set_ylim(-max_val, max_val)
ax.set_aspect('equal')
ax.grid(True, alpha=0.3)
ax.axhline(y=0, color='k', linewidth=0.5)
ax.axvline(x=0, color='k', linewidth=0.5)
ax.set_title(title)
# Add result text
ax.text(0.02, 0.98, f'A + B = ({resultant[0]}, {resultant[1]})',
transform=ax.transAxes, fontsize=10, verticalalignment='top',
bbox=dict(boxstyle='round', facecolor='lightgreen', alpha=0.7))
plt.suptitle('Multiple Examples of Vector Addition', fontsize=16, fontweight='bold')
plt.tight_layout()
plt.show()
plot_multiple_examples()
Subtraction is also done componentwise.
Vector Subtraction: Let \(\mathbf{u}\) and \(\mathbf{v}\) be vectors with \(n\) components. Then \(\mathbf{w} = \mathbf{u} - \mathbf{v}\) is the vector whose \(i^{th}\) component \(w_i = u_i - v_i\).
Example:
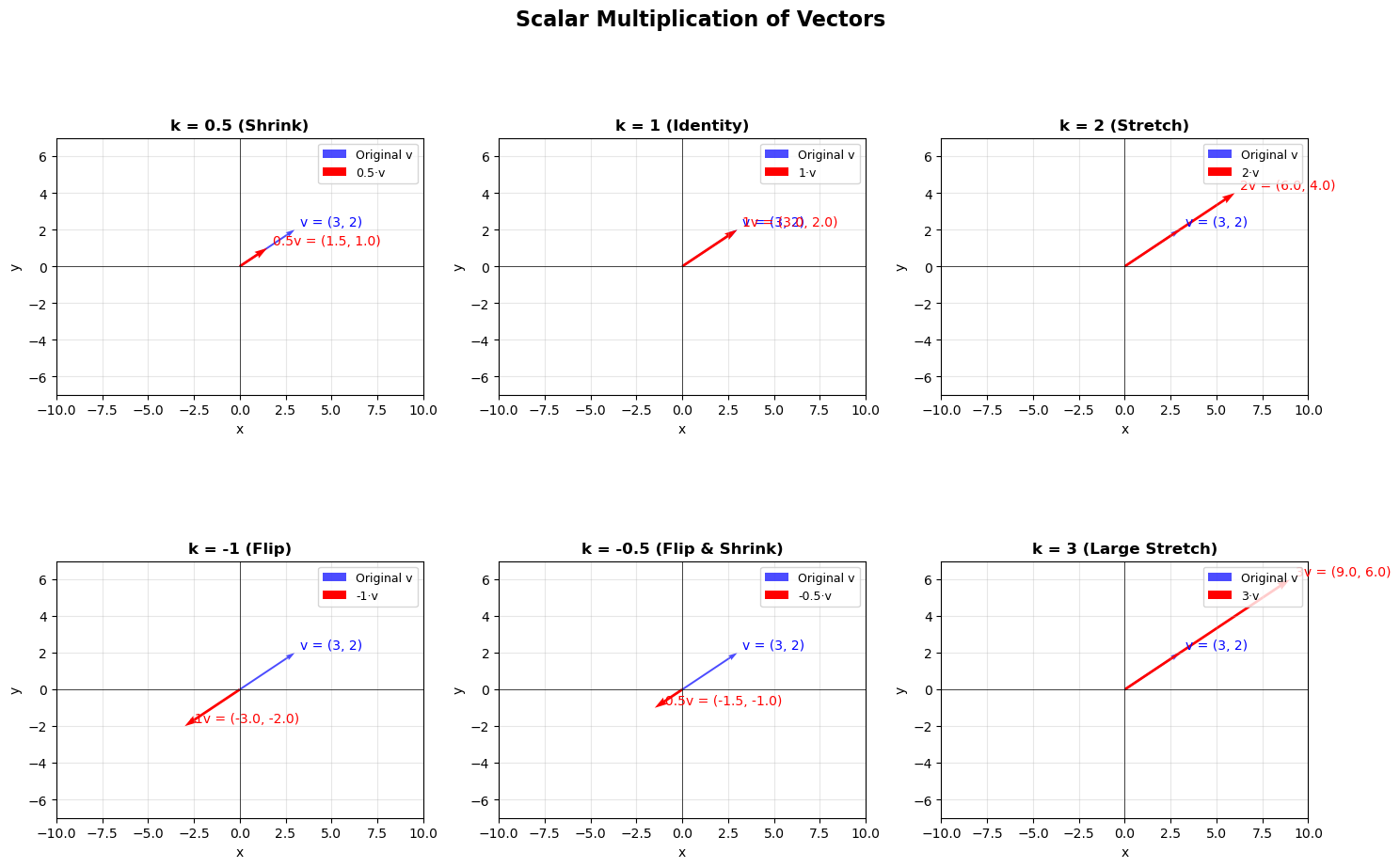
Scalar Multiplication: Given a real number \(s\) and a Euclidean vector \(\mathbf{u}\), we define a multiplication between \(s\) and \(\mathbf{u}\) as follows: \(s\cdot\mathbf{u}\) is the vector whose \(i^{th}\) component is \(s\cdot u_i\).
Example:
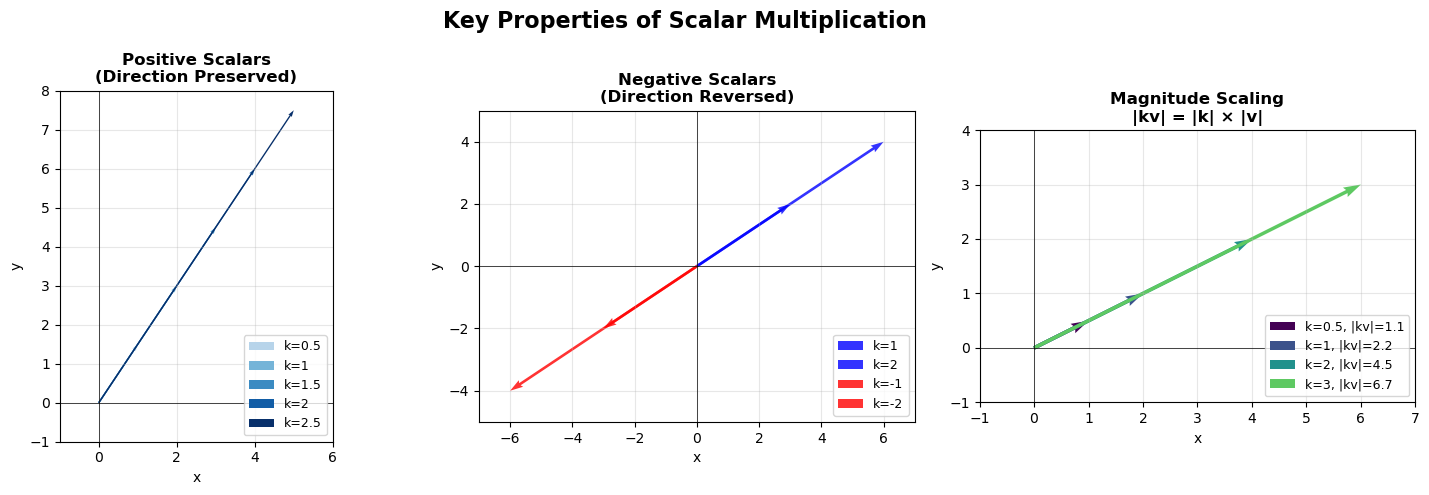
This multiplication is called scalar multiplication because it scales the vector: that is, it changes the magnitude of the vector but does not change its direction. You can see this illustrated below. Because of this, we commonly refer to real numbers as scalars in linear algebra.
def visualize_scalar_multiplication():
"""
Illustrates scalar multiplication of vectors using matplotlib
"""
# Create figure with subplots
fig, axes = plt.subplots(2, 3, figsize=(15, 10))
fig.suptitle('Scalar Multiplication of Vectors', fontsize=16, fontweight='bold')
# Original vector
v = np.array([3, 2])
# Different scalar values to demonstrate
scalars = [0.5, 1, 2, -1, -0.5, 3]
titles = ['k = 0.5 (Shrink)', 'k = 1 (Identity)', 'k = 2 (Stretch)',
'k = -1 (Flip)', 'k = -0.5 (Flip & Shrink)', 'k = 3 (Large Stretch)']
# Flatten axes for easier iteration
axes_flat = axes.flatten()
for i, (k, title) in enumerate(zip(scalars, titles)):
ax = axes_flat[i]
# Calculate scaled vector
kv = k * v
# Set up the plot
ax.set_xlim(-10, 10)
ax.set_ylim(-7, 7)
ax.grid(True, alpha=0.3)
ax.axhline(y=0, color='k', linewidth=0.5)
ax.axvline(x=0, color='k', linewidth=0.5)
# Draw original vector (in blue)
ax.quiver(0, 0, v[0], v[1], angles='xy', scale_units='xy', scale=1,
color='blue', width=0.005, alpha=0.7, label='Original v')
# Draw scaled vector (in red)
ax.quiver(0, 0, kv[0], kv[1], angles='xy', scale_units='xy', scale=1,
color='red', width=0.007, label=f'{k}·v')
# Add vector labels
if k != 0: # Avoid division by zero for zero vector
# Position labels at the end of vectors
ax.text(v[0] + 0.3, v[1] + 0.2, f'v = ({v[0]}, {v[1]})',
fontsize=10, color='blue', ha='left')
ax.text(kv[0] + 0.3, kv[1] + 0.2, f'{k}v = ({kv[0]:.1f}, {kv[1]:.1f})',
fontsize=10, color='red', ha='left')
else:
ax.text(v[0] + 0.3, v[1] + 0.2, f'v = ({v[0]}, {v[1]})',
fontsize=10, color='blue', ha='left')
ax.text(0.5, -0.5, f'{k}v = (0, 0)',
fontsize=10, color='red', ha='left')
# Set title and labels
ax.set_title(title, fontsize=12, fontweight='bold')
ax.set_xlabel('x')
ax.set_ylabel('y')
ax.legend(loc='upper right', fontsize=9)
# Make axes equal for proper vector visualization
ax.set_aspect('equal')
plt.tight_layout()
plt.show()
def demonstrate_properties():
"""
Demonstrates key properties of scalar multiplication
"""
fig, axes = plt.subplots(1, 3, figsize=(15, 5))
fig.suptitle('Key Properties of Scalar Multiplication', fontsize=16, fontweight='bold')
# Property 1: Scaling preserves direction (for positive scalars)
ax1 = axes[0]
v = np.array([2, 3])
scalars = [0.5, 1, 1.5, 2, 2.5]
colors = plt.cm.Blues(np.linspace(0.3, 1, len(scalars)))
ax1.set_xlim(-1, 6)
ax1.set_ylim(-1, 8)
ax1.grid(True, alpha=0.3)
ax1.axhline(y=0, color='k', linewidth=0.5)
ax1.axvline(x=0, color='k', linewidth=0.5)
for i, (k, color) in enumerate(zip(scalars, colors)):
kv = k * v
ax1.quiver(0, 0, kv[0], kv[1], angles='xy', scale_units='xy', scale=1,
color=color, width=0.005, label=f'k={k}')
ax1.set_title('Positive Scalars\n(Direction Preserved)', fontweight='bold')
ax1.set_xlabel('x')
ax1.set_ylabel('y')
ax1.legend(fontsize=9, loc='lower right')
ax1.set_aspect('equal')
# Property 2: Negative scalars flip direction
ax2 = axes[1]
v = np.array([3, 2])
positive_scalars = [1, 2]
negative_scalars = [-1, -2]
ax2.set_xlim(-7, 7)
ax2.set_ylim(-5, 5)
ax2.grid(True, alpha=0.3)
ax2.axhline(y=0, color='k', linewidth=0.5)
ax2.axvline(x=0, color='k', linewidth=0.5)
# Draw positive scaled vectors
for k in positive_scalars:
kv = k * v
ax2.quiver(0, 0, kv[0], kv[1], angles='xy', scale_units='xy', scale=1,
color='blue', width=0.006, label=f'k={k}', alpha=0.8)
# Draw negative scaled vectors
for k in negative_scalars:
kv = k * v
ax2.quiver(0, 0, kv[0], kv[1], angles='xy', scale_units='xy', scale=1,
color='red', width=0.006, label=f'k={k}', alpha=0.8)
ax2.set_title('Negative Scalars\n(Direction Reversed)', fontweight='bold')
ax2.set_xlabel('x')
ax2.set_ylabel('y')
ax2.legend(fontsize=9, loc='lower right')
ax2.set_aspect('equal')
# Property 3: Magnitude scaling
ax3 = axes[2]
v = np.array([2, 1])
scalars = [0.5, 1, 2, 3]
ax3.set_xlim(-1, 7)
ax3.set_ylim(-1, 4)
ax3.grid(True, alpha=0.3)
ax3.axhline(y=0, color='k', linewidth=0.5)
ax3.axvline(x=0, color='k', linewidth=0.5)
for i, k in enumerate(scalars):
kv = k * v
magnitude = np.linalg.norm(kv)
color = plt.cm.viridis(i / len(scalars))
ax3.quiver(0, 0, kv[0], kv[1], angles='xy', scale_units='xy', scale=1,
color=color, width=0.008,
label=f'k={k}, |kv|={magnitude:.1f}')
ax3.set_title('Magnitude Scaling\n|kv| = |k| × |v|', fontweight='bold')
ax3.set_xlabel('x')
ax3.set_ylabel('y')
ax3.legend(fontsize=9, loc='lower right')
ax3.set_aspect('equal')
plt.tight_layout()
plt.show()
visualize_scalar_multiplication()
demonstrate_properties()
Important Properties of Vector Arithmetic
Scalar multiplication, vector addition, and vector subtraction are associative and distributive operations: if \(s, t\) are scalars and \(\mathbf{u}, \mathbf{v}, \mathbf{w}\) vectors, then
\(s(\mathbf{u} + \mathbf{v}) = s\mathbf{u} + s\mathbf{v}\) (distributive property),
\(s(t\mathbf{u}) = (st)\mathbf{u}\) (associative property),
\((s + t)\mathbf{u} = s\mathbf{u} + t\mathbf{u}\) (distributive property), and
\(\mathbf{u} + (\mathbf{v} + \mathbf{w}) = (\mathbf{u} + \mathbf{v}) + \mathbf{w}\) (associative property).
Pause for a moment and make up several examples to verify some of these properties.
Note that vector subtraction can be seen as a combination of vector addition and scalar multiplication with a negative scalar; for example,
Linear Combinations#
Definition
Given vectors \(v_1, v_2,\dots,v_k\) and scalars \(a_1, \dots,a_k\), the expression
is called a linear combination of \(v_1, v_2,\dots,v_k\).
Example: Let
Here are a two arbitrarily chosen linear combinations of \(v_1, v_2\), and \(v_3\).
- \[\begin{split} \mathbf{u_1} = 2v_1 + v_2 + 3v_3 = 2\begin{bmatrix} -1 \\ \hfill 1 \\ -1 \end{bmatrix} + \begin{bmatrix} 3 \\ 4 \\ 1 \end{bmatrix} + 3\begin{bmatrix} 2 \\ 2 \\ 0 \end{bmatrix} = \begin{bmatrix} 3 \\ 12 \\ -1 \end{bmatrix}. \end{split}\]
- \[\begin{split} \mathbf{u_2} = v_1 - v_2 + 2v_3 = \begin{bmatrix} -1 \\ \hfill 1 \\ -1 \end{bmatrix} - \begin{bmatrix} 3 \\ 4 \\ 1 \end{bmatrix} + 2\begin{bmatrix} 2 \\ 2 \\ 0 \end{bmatrix} = \begin{bmatrix} 0 \\ 1 \\ -2 \end{bmatrix}. \end{split}\]
Important
A linear combination of vectors simply produces another vector that is a sum of scalar multiples of the vectors from which it is constructed. Despite the simplicity of this construction, we will find that all of linear algebra revolves around linear combinations in one way or another.
The Dot Product#
Multiplying vectors is not as intuitive as the preceding operations. There are a number of different ways that one might choose to define multiplication between vectors, including simply doing the multiplication componentwise to produce a new vector, analgous to what we did previously with addition and subtraction. Unfortunately, multiplying vectors componentwise to produce another vector doesn’t have an intuitive interpretation or an obvious application, but interestingly enough, if we multiply the corresponding components of two vectors together and add up the resulting products, we get a scalar that has several very important uses. This operation is called the dot product, or the inner product, or the scalar product (the latter because the result of the operation is a scalar), and it is defined precisely below.
Definition
Let \(\mathbf{u},\mathbf{v}\) be vectors with \(n\) components. The dot product, also referred to as the inner product or scalar product of \(\mathbf{u}\) and \(\mathbf{b}\) is the scalar value
Important
Just like the previous operations that we have discussed, the dot product of vectors of different dimension is not defined.
Example:
Example:
Exercise: Sketch the vectors above in standard position. Notice the angle between them.
Properties of the Dot Product
The dot product has several nice properties. Given vectors \(\mathbf{x}, \mathbf{y}, \mathbf{w}\), we can show that
\(\mathbf{x}\cdot\mathbf{y} = \mathbf{y}\cdot\mathbf{x}\) (commutativity)
\((\mathbf{x} + \mathbf{y})\cdot\mathbf{w} = \mathbf{x}\cdot\mathbf{w} + \mathbf{y}\cdot\mathbf{w}\) (distributivity).
Example: We can calculate the dot product of a vector with itself:
This is where we find our first use for the dot product. Notice that in the previous example, the calculation is reminiscent of the Pythagorean Theorem \(a^2 + b^2 = c^2\). When we calculate the dot product of a vector with itself, we are using the Pythagorean theorem to determine the squared magnitude, or length, of the vector. When can sketch this for the example above because it is two-dimensional, but the principle holds no matter how many dimensions we are working with.
Definition
Let \(\mathbf{u}\) be a vector. The norm of \(\mathbf{u}\) is written \(||\mathbf{u}||\) and defined as the square root of the dot product of \(\mathbf{u}\) with itself:
Note that strictly from the definition we can see that the norm of a vector is never negative, and could only equal zero if every component of the vector was 0. We call a vector whose components are all 0 a zero vector or trivial vector and write it as \(\mathbf{0}\).
Definition
A unit vector is a vector with norm 1.
Given a vector \(\mathbf{x}\), it is easy to produce a unit vector that points in the same direction of \(\mathbf{x}\): simply calculate \(||\mathbf{x}||\) and multiply \(\mathbf{x}\) by \(1/||\mathbf{x}||\); that is, calculate
This is scalar multiplication, so we already know that this scales \(\mathbf{x}\) without changing its direction, and you can check for small examples that the norm of the resulting vector \(\mathbf{u}\) is 1.
Example: Let
Then \(||\mathbf{x}|| = \sqrt{2^2 + 1^2 + 1^2} = \sqrt{6}\). Let
Now calculate \(||\mathbf{u}|| = \sqrt{(2/\sqrt{6})^2 + (1/\sqrt{6})^2 + (1/\sqrt{6})^2} = \sqrt{4/6 + 1/6 + 1/6} = \sqrt{1} = 1\).
The second place where we find use for the dot product is in determining the angle between two vectors. Consider the example above where the dot product of two vectors was zero. You probably noticed when you sketched them that they are perpendicular; that is, the angle between them is \(90^{\circ}\) or \(\pi/2\) radians. In fact, the following is true:
Theorem
Let \(\mathbf{u}, \mathbf{v}\) be vectors. \(\mathbf{u}\cdot\mathbf{v} = ||\mathbf{u}||||\mathbf{v}||\cos{\theta}\), where \(\theta\) is the angle between \(\mathbf{u}\) and \(\mathbf{v}\).
There are a number of ways to prove this fact, generally all based on the Law of Cosines. A complete proof will be left to the exercises, but below we will give a proof in the two-dimensional case that relies on the fact that (regardless of dimension) the dot product is invariant to rotation; that is, the dot product between two vectors will be the same even if the vectors are rotated, as long as the vectors are rotated by the same amount. We will revisit and prove this very important fact later on; but you can easily test this yourself with a quick example or two; for instance, compare the dot products of the vectors
where the second pair of vectors are just the first vectors rotated counterclockwise by \(45^{\circ}\) or \(\pi/4\) radians.
Proof (in 2 dimensions): Let \(\mathbf{x}\) and \(\mathbf{y}\) be vectors in two dimensions and let \(\mathbf{u} = \mathbf{x} / ||\mathbf{x}||\) and \(\mathbf{v} = \mathbf{y} / ||\mathbf{y}||\). Then \(\mathbf{u}\) and \(\mathbf{v}\) are unit vectors. Because the dot product is invariant to rotation, we can rotate \(\mathbf{x}\) and \(\mathbf{y}\) until \(\mathbf{x}\) points along the \(x\)-axis without changing the value of \(\mathbf{x}\cdot\mathbf{y}\). Then
where \(\theta\) is the angle between \(\mathbf{x}\) and \(\mathbf{y}\) (equivalently, the angle between \(\mathbf{u}\) and \(\mathbf{v}\)). We get the latter form for \(\mathbf{v}\) because as a unit vector \(\mathbf{v}\) terminates in a point on the unit circle when in standard position. Now a direct calculation shows that
but
so
\(\blacksquare\)
One immediate application of this theorem is that it gives us a way to quickly tell if two vectors meet at a right angle: if so, their dot product is 0 because \(\cos(\pi/2)=0\). Similarly, when two vectors point in the same direction \(\theta=0\), and thus their dot product will be the product of their norms, because \(\cos(0) = 1\). More generally, the following inequality is often useful.
Theorem (Cauchy-Schwarz Inequality)
Let \(\mathbf{u}\) and \(\mathbf{v}\) be vectors. Then \(|\mathbf{u}\cdot\mathbf{v}| <= ||\mathbf{u}||||\mathbf{v}||\).
Proof: Since \(|\cos\theta| <= 1\), \(|\mathbf{u}\cdot\mathbf{v}| = ||\mathbf{u}||||\mathbf{v}|||\cos\theta|<= ||\mathbf{u}||||\mathbf{v}||\). \(\blacksquare\)
An immediate corollary to the Cauchy-Schwarz inequality is the Triangle Inequality given below.
Theorem (Triangle Inequality)
Let \(\mathbf{u}\) and \(\mathbf{v}\) be vectors. Then $\(||\mathbf{u} + \mathbf{v}|| <= ||\mathbf{u}|| + ||\mathbf{v}||\)$.
Proof: First, note that \(||\mathbf{u} + \mathbf{v}||^2 = (\mathbf{u} + \mathbf{v})\cdot(\mathbf{u} + \mathbf{v})\). Using the distributivity of the dot product, we can write this as
which equals
Now by the Cauchy-Schwarz Inequality, the above expression is less than or equal to
that is,
and taking square roots on both sides leads to the result. \(\blacksquare\)
With two-dimensional vectors sketched in the plane, the triangle inequality is obvious: it simply states that the length of the longest side of a triangle cannot be greater than the sum of the lengths of the other sides. It is important to keep in mind, here and going forward, that this result and the others that we’ve obtained so far hold in higher dimensions where we can’t sketch out and easily visualize the behavior of the vectors we are working with. This is part of what makes liner algebra so powerful.
Vectors in Python#
In Python, the Numeric Python (NumPy) library contains an array object that can be used to represent a vector. After importing NumPy (typically abbreviating it as np), we can define vectors using the array object by passing a list of components as demonstrated below:
import numpy as np
u = np.array([1, 2, 3])
v = np.array([4, 5, 6])
The dimension of a vector can be obtained via the shape attribute:
u.shape
(3,)
The individual components of a vector can be accessed using sqare brackets. Remember that Python uses 0-based indexing!
u[2] # using 0-based indexing, the element in position 2 is the third element
np.int64(3)
The dot product of two vectors can be calculated two ways: using the np.dot function or using the shorthand @ symbol:
dot_np = np.dot(u, v)
dot_at = u @ v
print(f'The dot product of u and v with np.dot is {dot_np}.')
print(f'The dot product of u and v with @ is {dot_at}.')
The dot product of u and v with np.dot is 32.
The dot product of u and v with @ is 32.
NumPy has a submodule np.linalg containing various linear algebra-specific functions. For example, the norm of a vector can be calculated using the np.linalg.norm function:
np.linalg.norm(u)
np.float64(3.7416573867739413)
Of course, this could also be caculated from the definition of the norm of a vector as the square root of the dot product of the vector with itself:
np.sqrt(u @ u)
np.float64(3.7416573867739413)
For some special vectors, such as the zero vector of dimension \(n\) or a vector of values chosen uniformly at random, there are shortcuts for their creation:
# three-dimensional zero vector
zero_vec = np.zeros(3)
zero_vec
array([0., 0., 0.])
# 12-dimensional vector with values in [0, 1] chosen uniformly at random
random_vec = np.random.uniform(low=0, high=1, size=(12,))
random_vec
array([0.8124771 , 0.33280111, 0.99862446, 0.95546896, 0.27792807,
0.37862118, 0.51148349, 0.60597677, 0.83175399, 0.94811053,
0.66492572, 0.33349912])